Cheetah-cub, a compliant quadruped robot
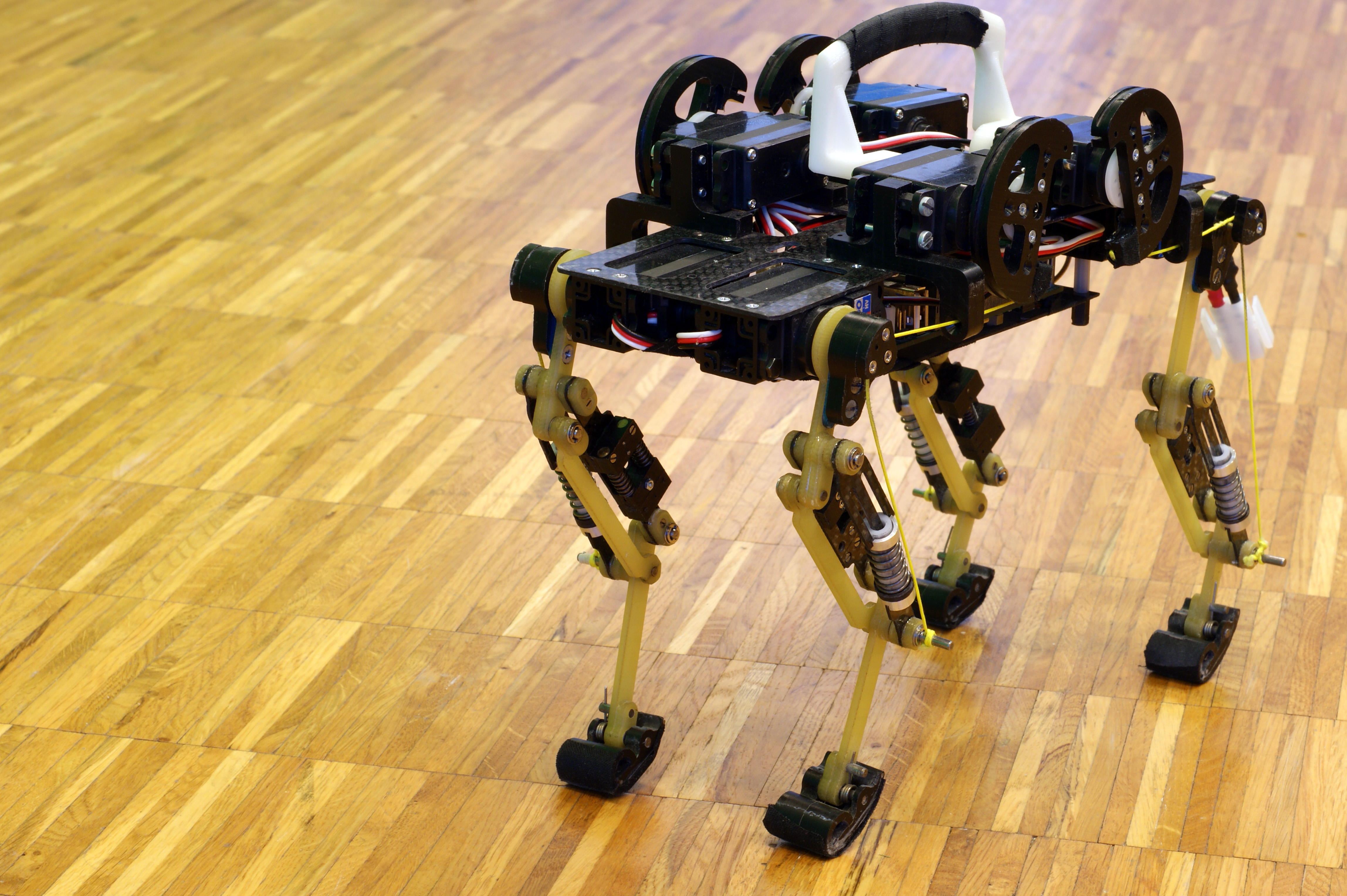
We are glad to present Cheetah-cub, a compliant quadruped robot with the size of a small house cat, or a young cheetah cub. The robot weights 1kg and is approximately 21cm long. It reaches 1.42m/s speed, almost seven body lengths per second. This makes Cheetah-cub robot the fastest running quadruped legged robot under 30kg.
Cheetah-Cub has several interesting features, especially when compared to larger and stiffer quadruped robot designs. 1) It is, to the best of our knowledge, the fastest of all quadruped robots below 30kg (in terms of Froude number and body lengths per second). 2) It shows self-stabilizing behavior over a large range of speeds with open loop control. 3) It is lightweight, compact, electrically powered. 4) It is cheap, easy to reproduce, robust, and safe to handle. This makes it an excellent tool for research of multi-segment legs in quadruped robots.
This work appears in the IJRR OnlineFirst June 2013 issue (Monday June 17, 2013). More information including pictures, videos, publications, and a more detailed technical description can be found below on this page. Videos can also be found on our epflbiorob Youtube channel. This work is funded by the European Commission through the AMARSI project.
Pictures
Copyright of pictures and videos: see the end of this page.
Movies
Embed of video is only possible from Mediaspace, SwitchTube, Vimeo or Youtube
Research overview
We show experimental results where Cheetah-cub robot reaches 1.42m/s speed, almost seven body lengths per second. This makes Cheetah-cub robot the fastest running quadruped legged robot under 30kg (normalized speed via Froude number FR=1.3=(speed^2)/(G times leg length) . The robot exhibits robust locomotion and self-stabilizing characteristics: even when it encounters perturbations at high speed such as a step-down, it will often successfully pass this obstacle (between 80% and 20% success rate depending on the height of the step down, with step-down heights up to 20% of the standing leg length). This robustness, and the results of further experiments, are indicators of the self-stabilizing properties of the robot’s leg and locomotion patterns: all experiments were conducted in an open-loop fashion.
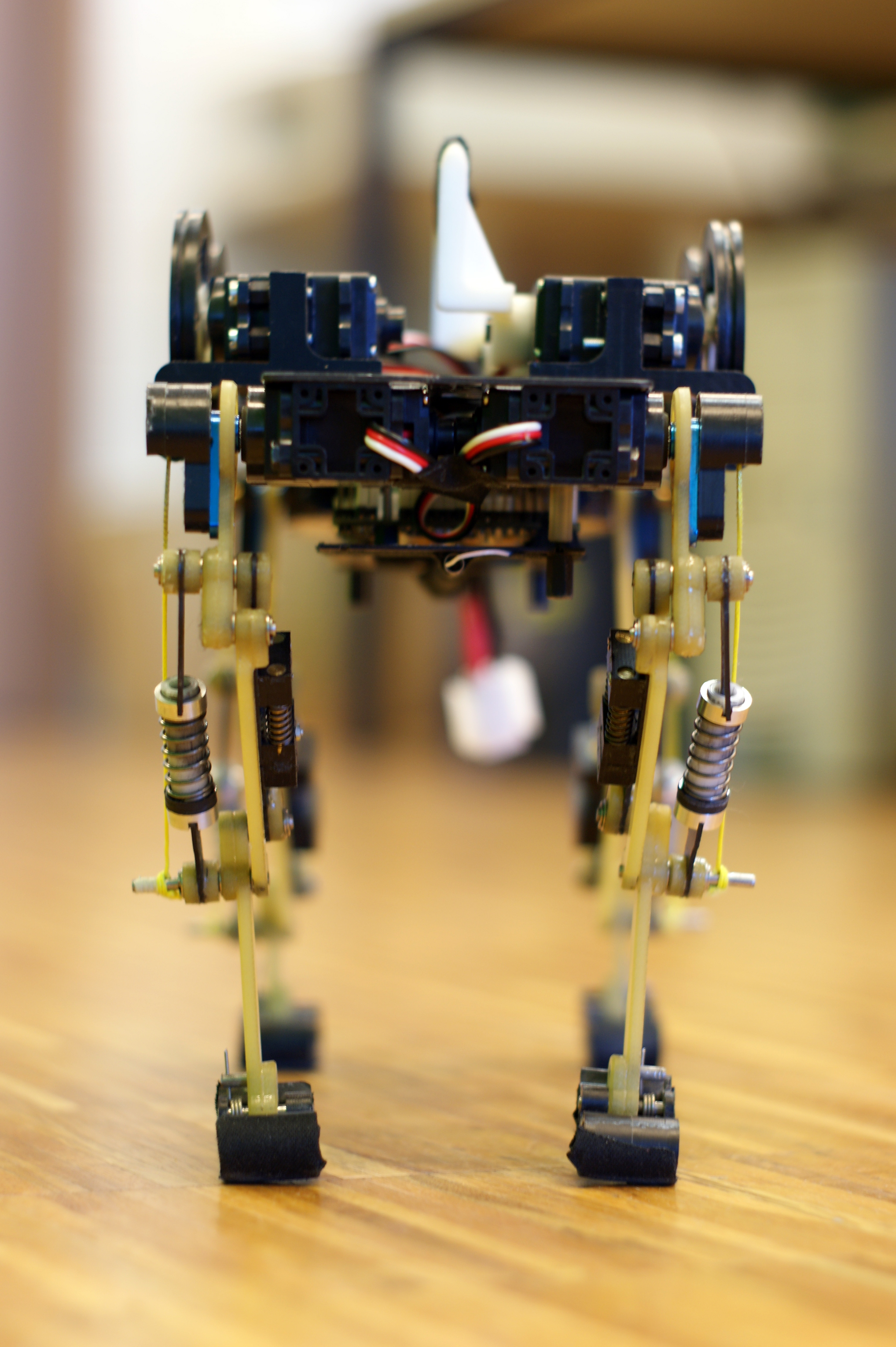
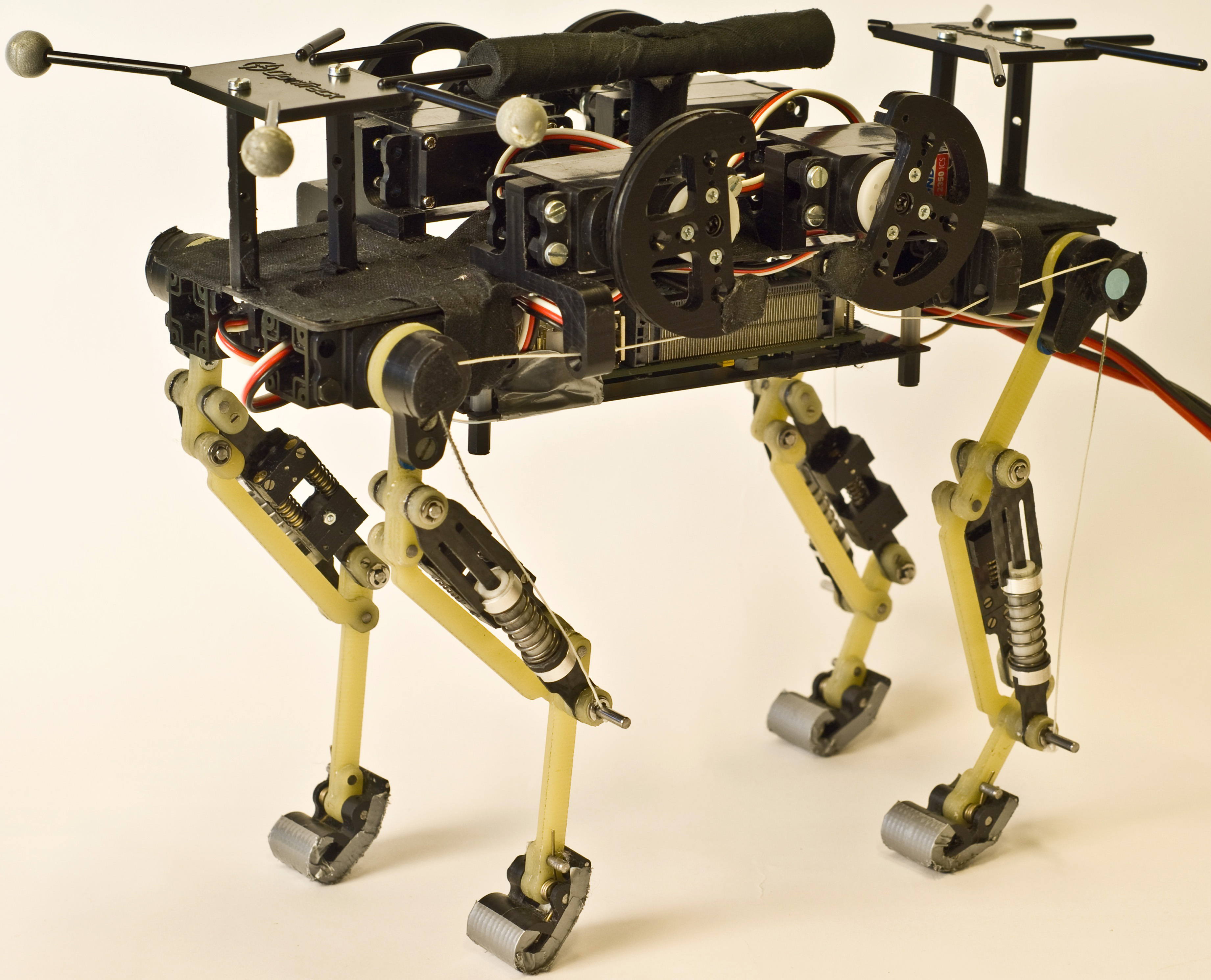
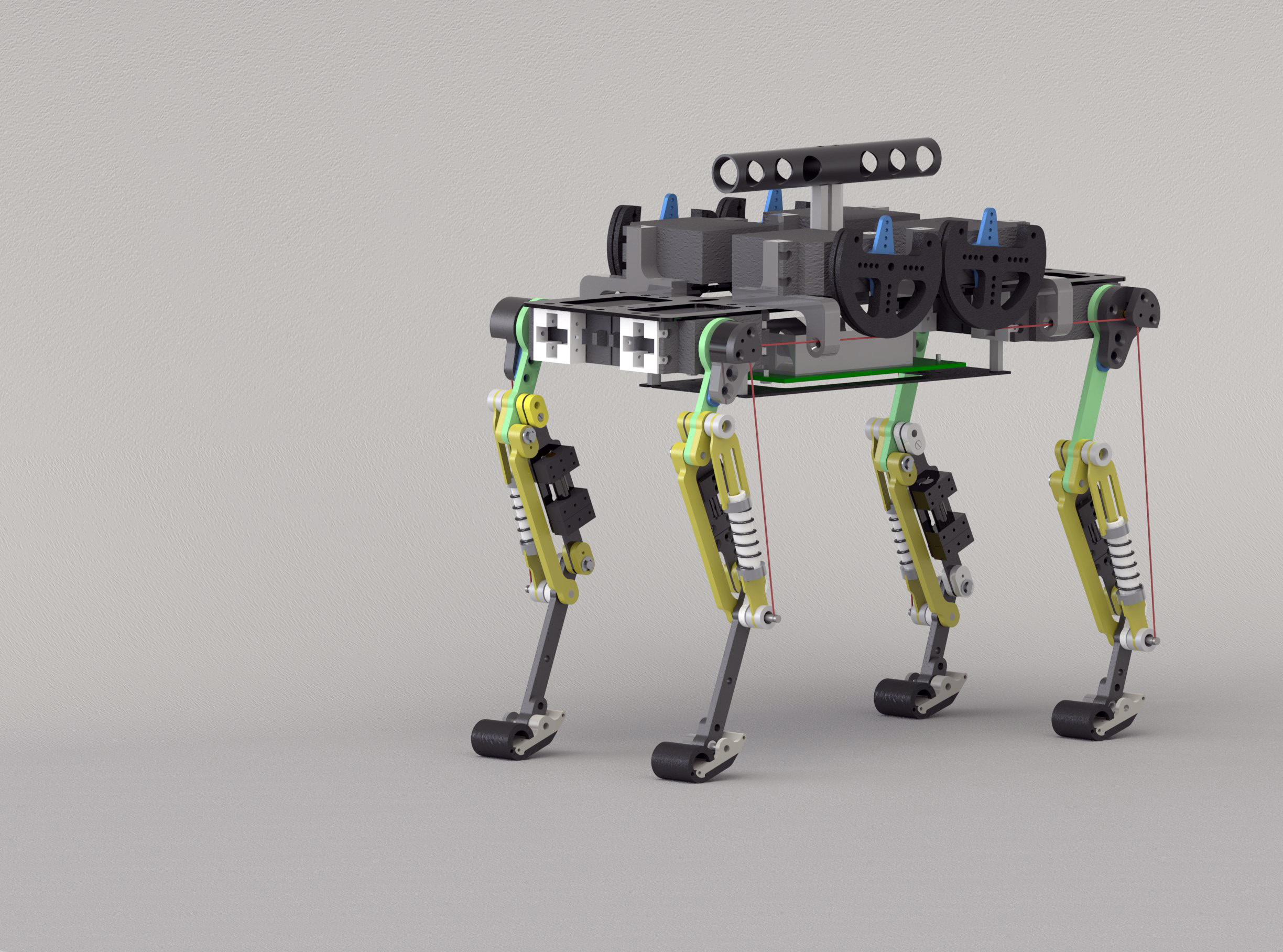
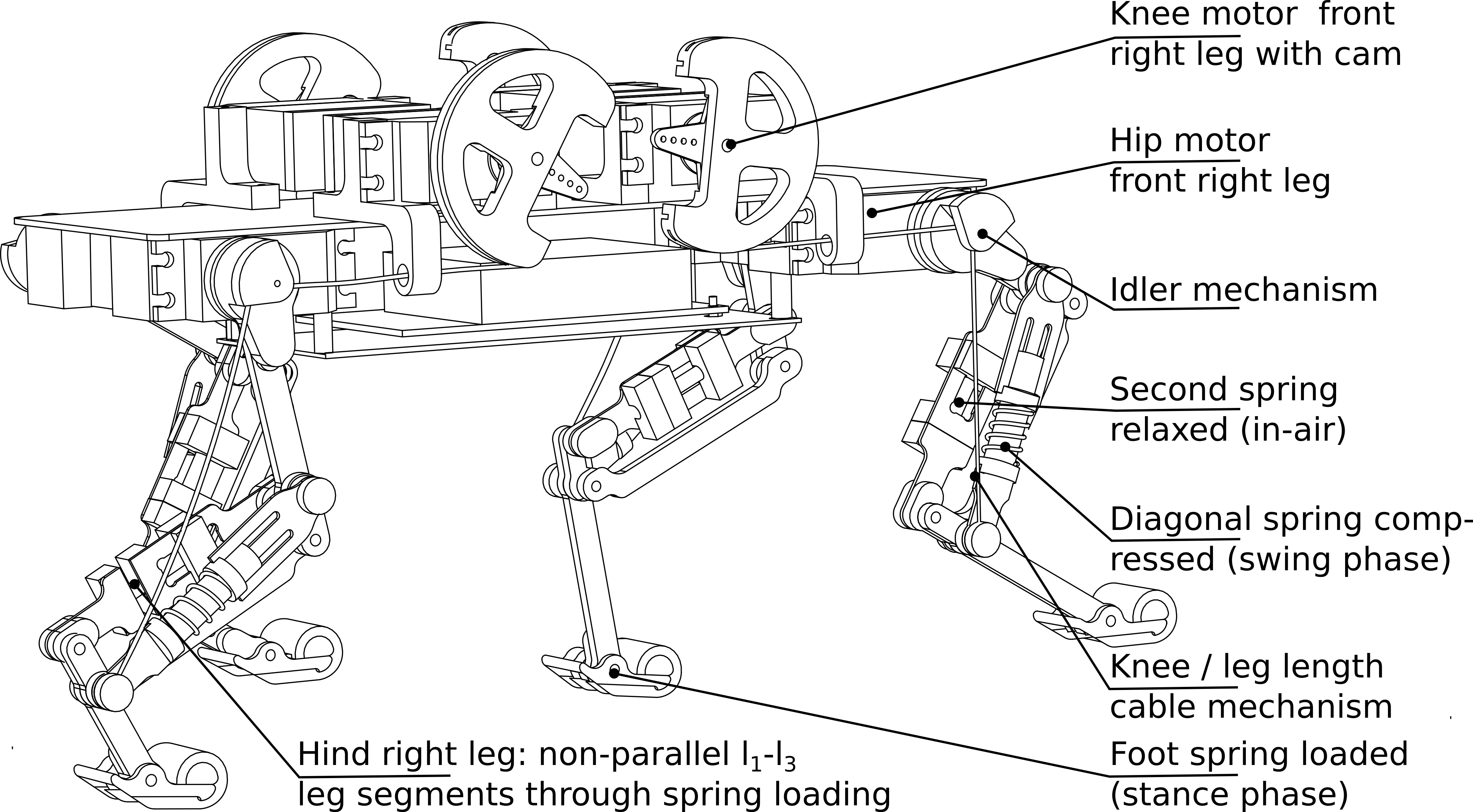
Cheetah-cub robot is a 1kg machine of the size of a small house cat, or a young cheetah cub. The robot’s 15cm long legs were designed and implemented according to a blueprint suggested by researcher from Biomechanics (e.g. Witte et al., 2001). They observed that many quadrupedal, mammalian animals feature a distinguished functional three-segment front leg and hind leg design, and proposed a “pantograph” leg abstraction for robotic research. With Cheetah-cub, we pursue this blueprint, and designed, implemented, and tested two variations of such a pantograph leg design. Both implementations make use of in-parallel leg elasticity, through leg springs integrated in the pantograph and the robot’s feet. The passive response of mechanical springs in robot legs has shown to be a good approximation of the muscle-tendon complex in animal legs and humans. The robot’s legs were each actuated by two powerful RC servo motors, moving hip and knee joints.
| Characteristics of Cheetah-cub robot | |
| Maximum speed, vmax | 1.42m/s (5.1km/h or 3.2 miles/h) |
| Froude number FR (v^2/G/lhip) | 1.30 |
| Body lengths per second | 6.9 |
| Gait type | Trot |
| Active degrees of freedom | 8 |
| Mrobot | 1100g (2.4 pounds) |
| Mactuators, sum | 590g |
| lhip, standing height | 0.158m (0.5 foot) |
| dshoulder-shoulder | 0.1m |
| dhip-shoulder | 0.205m |
| RC servo motor | Kondo KRS2350 ICS (8x) |
| Stall torque RC servo | 2Nm at 6V |
| Speed max RC servo | 0.16s / 60deg at 6V |
| Control board | RoBoard RB110 |
| Power supply, tethered | 8V to 14V |
Work with Cheetah-cub is also a continuation of work at the Biorobotics laboratory researching central pattern generators (CPGs): networks of coupled neurons. CPGs are sophisticated circuits that can produce complex locomotor patterns while receiving only simple command signals from upper parts of the brain. Cheetah-cub is a natural follow-up to Amphibot and Salamandra robotica, which were Biorob’s first CPG driven, lamprey-like and salamander-like robots. For Cheetah-cub robot we again implemented a CPG, for the generation of a variety of trot-gait like locomotion patterns. When designing Cheetah-cub’s CPG, we focused on biomechanically feasible control parameters: amplitude and offsets of hip oscillations, frequency of the locomotion cycle, and phase relationship between hip angle and knee angle. A very important parameter for animal locomotion is the leg cycle duty factor: it determines the amount of time a leg touches the ground and propels the animal forward, versus the full locomotion cycle time. For slower locomotion, the duty factor is typically higher, the leg stays longer on the ground than it swings through the air. With faster locomotion speed the duty factor becomes smaller. Duty factor is one control parameter in Cheetah-cub’s CPG controller.
The combination of Cheetah-cub robot’s bio-inspired leg design, and its CPG-based control allowed us to robustly test both components. We used an external motion capture system based on reflective markers to accurately measure robot position and orientation in space. Two force plates recorded ground reaction force data, and we recorded the power consumption of Cheetah-cubs actuation to calculate its electrical (metabolic) cost of transport.
Cheetah-cub robot has several interesting features, especially when compared to larger and stiffer quadruped robot designs. 1) It is, to the best of our knowledge, the fastest of all quadruped robots below 30kg (in terms of Froude number and body lengths per second). 2) It shows self-stabilizing behavior over a large range of speeds with open loop control. 3) It is lightweight, compact, electrically powered. 4) It is cheap, easy to reproduce, robust, and safe to handle. This makes it an excellent tool for research of multi-segment legs in quadruped robots.
Scientific publication (available online from Monday June 17th, 2013):
“Towards Dynamic Trot Gait Locomotion-Design, Control and Experiments with Cheetah-cub, a Compliant Quadruped Robot”. Sprowitz, Alexander; Tuleu, Alexandre; Vespignani, Massimo; Ajallooeian, Mostafa; Badri, Emilie; Ijspeert, Auke. The International Journal of Robotics Research 0278364913482017, first published June 17, 2013 as doi:10.1177/0278364913482017 . Draft version here.
See also:
“Horse-Like Walking, Trotting, and Galloping derived from Kinematic Motion Primitives (kMPs) and their Application to Walk/Trot Transitions in a Compliant Quadruped Robot” by Federico L. Moro, Alexander Sprowitz, Alexandre Tuleu, Massimo Vespignani, Nikos G. Tsagarakis, Auke J. Ijspeert, and Darwin G. Caldwell, Biological Cybernetics. 2013 Jun;107(3):309-20.
Sample videos
The AVI files require the DivX codec see http://www.divx.com or the Xvid codec see http://www.xvid.org.
Cheetah-cub robot running in the hallway (realtime): (MPG, 4.4MB) (AVI xvid, 6.4MB) (HD MP4, 12.2MB)
Cheetah-cub different step-down runs (slowmo): (MPG, 7.0MB) (AVI xvid, 10.3MB) (HD MP4, 21MB)
Cheetah-cub high-speed run, leg designs (slowmo): (MPG, 6.8MB) (AVI xvid, 9.9MB) (HD MP4, 21.3MB)
Cheetah-cub robot running in the hallway (slowmo): (MPG, 10.1MB) (AVI xvid, 15.0MB) (MP4, 14.2MB)
Mechanical robustness, Cheetah-cub (realtime): (MPG, 1.6MB) (AVI xvid, 2.3MB) (HD MP4, 30.2MB)
Hallway-run with onboard camera (realtime): (MPG, 8.6MB) (AVI xvid, 7.1MB) (HD MP4, 110.7MB)
Publications
Past Cheetah student projects
- Real-time of foot patch with RGB-D sensor and limited computational ressources, Emmanuel Pignat (Semester project, 2014-2015)
- Design and integration of a multiaxis force moment sensor for a mobile quadruped platform, Nicolas Sommer (Semester project, 2010-2011)
- Hardware Development on quadruped robots, Andreas Gassner (Semester project, 2010-2011)
- Improvement of the Cheetah Locomotion Control, Alexandre Tuleu (Master (diploma) project, 2009-2010)
- Segmented Leg Design in Robotics, Lorenz Küchler (Master (diploma) project, 2009-2010)
- Cheetah II robot, Max Fremerey (Internship, 2008-2009)
- Exploiting body dynamics on the Cheetah robot, Ivan Kviatkevitch (Semester project, 2008-2009)
- Hardware for Cheetah robot, Emily Poplawski (Internship, 2008-2009)
- Cheetah: compliant quadruped robot, Simon Rutishauser (Semester project, 2007-2008)
- Development and Test of a Simulation Model for the Cheetah Robot, Martin Riess (Semester project, 2007-2008)
If you are interested in a semester or master student project at Biorob, please contact us! We are always interested in hearing from motivated students. A comprehensive list of past student projects can be found here, a list of open projects can be found here. We are also open for suggestions.
Copyright
Feel free to use pictures and movies without prior permission, provided they are credited as follows: Biorobotics Laboratory, EPFL. Please contact us by email at massimo.vespignani at epfl.ch or auke.ijspeert at epfl.ch if you would like additional information or higher resolution videos.