Project description
We have designed hardware for modular robot units called Yamor (Yet another Modular Robot). The aim of the project is to create robot units that can rapidly be attached to each other in order to create arbitrary multi-unit robot structures. We are interested in developing adaptive algorithms that use local interactions rules between units in order to optimize the global behavior of the multi-unit structure.
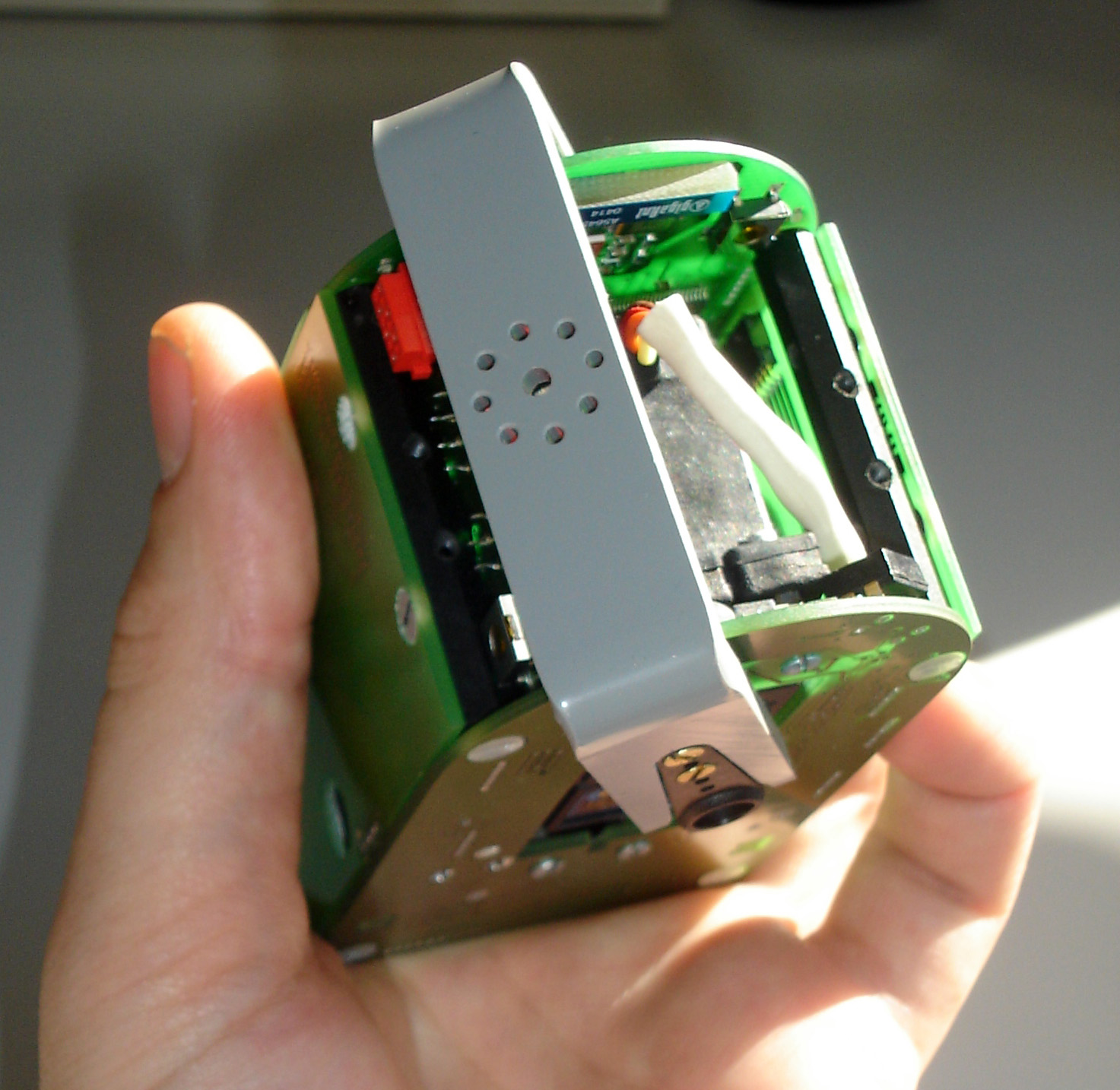
Yamor units have the following characteristics:
- each unit is autonomous in terms of power, sensing, actuation, and computing,
- they are driven by heavy-duty servos such that one unit can lift up to 3 others,
- they communicate via BlueTooth (i.e. no need for electrical connections between units),
- they are equiped with an FPGA and/or ARM processors for providing flexible computational power,
- they can be attached and detached manually from each other by a screw-and-pin system in multiple ways, which allows us to create different robot configuations.
The unit are designed to be of general-purpose. One particular control scheme we are interested in is to control the locomotion of the units by systems of coupled nonlinear oscillators.
Robot design

Yamor Movies
Student projects adaptive locomotion Yamor
- Optimization of the locomotion of YAMOR structures, Nicolas Comte (Semester project, 2013-2014)
- Control of Locomotion in Modular Robotics, Jérôme Maye (Master (diploma) project, 2006-2007)
- YaMoR Lifelong Learning, Michel Yerly (Master (diploma) project, 2006-2007)
- YaMoR II, Adamo Maddalena (Master (diploma) project, 2005-2006)
- Bluetooth Configuration of an FPGA: An Application to Modular Robotics), Jérôme Maye (Semester project, 2004-2005)
- Evolution and Online Optimization of Central Pattern Generators for Modular Robot Locomotion, Daniel Marbach (Master (diploma) project, 2004-2005)
- Using Bluetooth to Control a YaMoR Modular Robot, Kevin Drapel & Cyril Jaquier (Semester project, 2004-2005)
- YaMoR Modular Robot, Kevin Drapel & Cyril Jaquier (Semester project, 2004-2005)
- Design and construction of an autonomous modular robot unit with Bluetooth and FPGA, Rico Möckel (Internship, 2003-2004)
- Modular Robot Unit - Characterisation, Design and Realisation, Elmar Dittrich (Internship, 2003-2004)
- Self-Organization of Locomotion in Modular Robots, Yvan Bourquin (Internship, 2003-2004)
Student projects adaptive locomotion
- Optimization of the locomotion of YAMOR structures, Nicolas Comte (Semester project, 2013-2014)
- Online Optimization for the locomotion of Roombots, The Anh Nguyen (Semester project, 2011-2012)
- Online adaptation of locomotion control to changes of body structure, Michka Mélo (Semester project, 2010-2011)
- Co-evolution for Roombots, Ebru Aydin (Master (diploma) project, 2009-2010)
- YaMoR Lifelong Learning, Michel Yerly (Master (diploma) project, 2006-2007)
- Evolution and Online Optimization of Central Pattern Generators for Modular Robot Locomotion, Daniel Marbach (Master (diploma) project, 2004-2005)
- Framework for the Simulations of Modular Robots and Self-Organisation of Locomotion under Water, Barthélémy von Haller (Master (diploma) project, 2004-2005)
- Using Bluetooth to Control a YaMoR Modular Robot, Kevin Drapel & Cyril Jaquier (Semester project, 2004-2005)
- Design and construction of an autonomous modular robot unit with Bluetooth and FPGA, Rico Möckel (Internship, 2003-2004)
- Modular Robot Unit - Characterisation, Design and Realisation, Elmar Dittrich (Internship, 2003-2004)
- Self-Organisation of Locomotion in Modular Robots, Bertrand Mesot (Master (diploma) project, 2003-2004)
- Self-Organization of Locomotion in Modular Robots, Yvan Bourquin (Internship, 2003-2004)
- Adam - A Modular Robot Simulation and Evolution Tool, Daniel Marbach (Semester project, 2002-2003)
- Synchronization of nonlinear oscillators via Bluetooth, Edouard Goupy & Guillaume Du Pasquier (Semester project, 2002-2003)
People involved
Alexander Sproewitz, Rico Moeckel, André Guignard, André Badertscher, Auke Ijspeert
Related Publications
Polarization-multiplexed thulium-doped fiber laser for free-running dual-comb generation
2023. Fiber Lasers XX: Technology and Systems, San Francisco, California, United States, 28 january – 2 february 2023. DOI : 10.1117/12.2648361.BSL Circular Economy 2024 Conference – BSL Blog
2024-04-19.Resource-Efficient Continual Learning for Personalized Online Seizure Detection
2024-04-15. 46th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Orlando, Florida, USA, July 15-19, 2024.Analytical Model of Single-Sided Linear Induction Motors for High-Speed Applications
2024-03-01.Open Access Identifying Aerodynamics of Small Fixed-Wing Drones Using Inertial Measurements for Model-Based Navigation
Journal of the Institute of Navigation. August 9, 2023. Vol. 70, num. 4. DOI : 10.33012/navi.611.TEST JDM: Batch upload xml
2021-07-15