Remote control for CPG-based robots
Gabriel Cuendet
Abstract
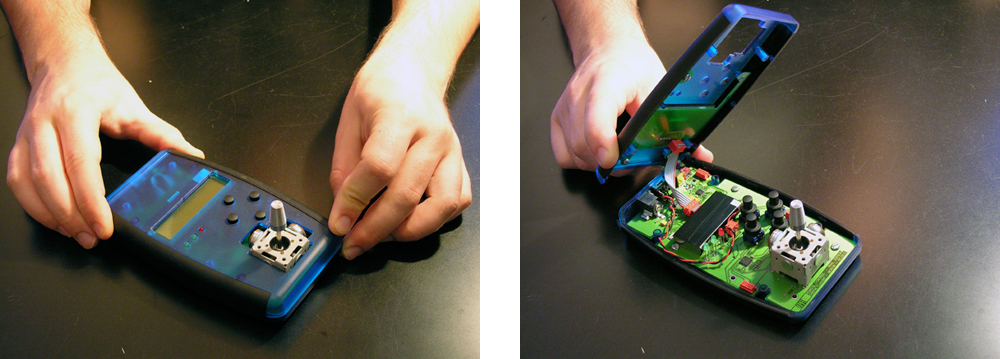
This 3rd year semester project’s aims at the realization of an autonomous remote control for the CPG-based Biorob’s robots.
The report presents the work that was done from the beginning of the project to the final realization of the device. The first step was the realization of a first prototype (the development version) on which the software could be developed. Then a second version was designed in order to fit into a case. Some considerations were also made about the ergonomics of the device.
The mid-term presentation and the final presentation are the slides shown during the presentations.
Report and presentations
- Mid-Term_Presentation.ppt
- Mid-Term_Presentation.pdf
- REPORT_RemoteControl_FINAL.pdf
- Final_Presentation.ppt
- Final_Presentation.pdf
C Code
Here are the files with the code on the microcontroller PIC18F2580.