Description
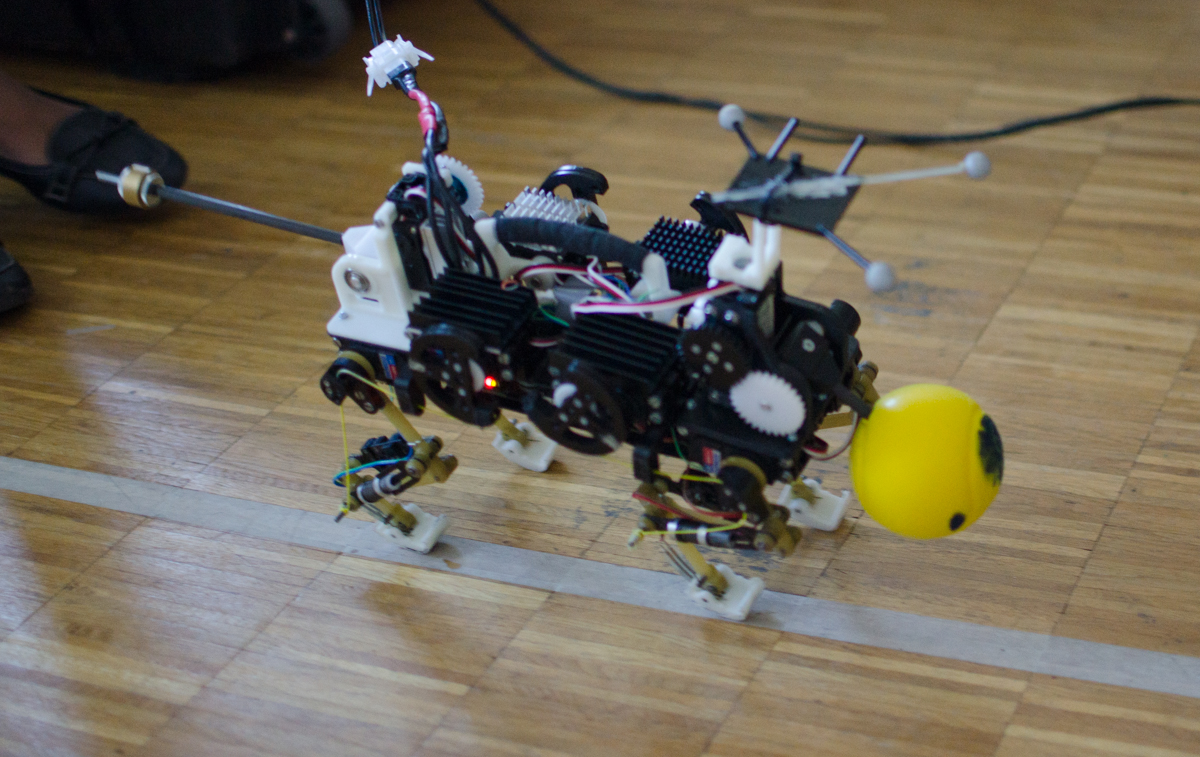
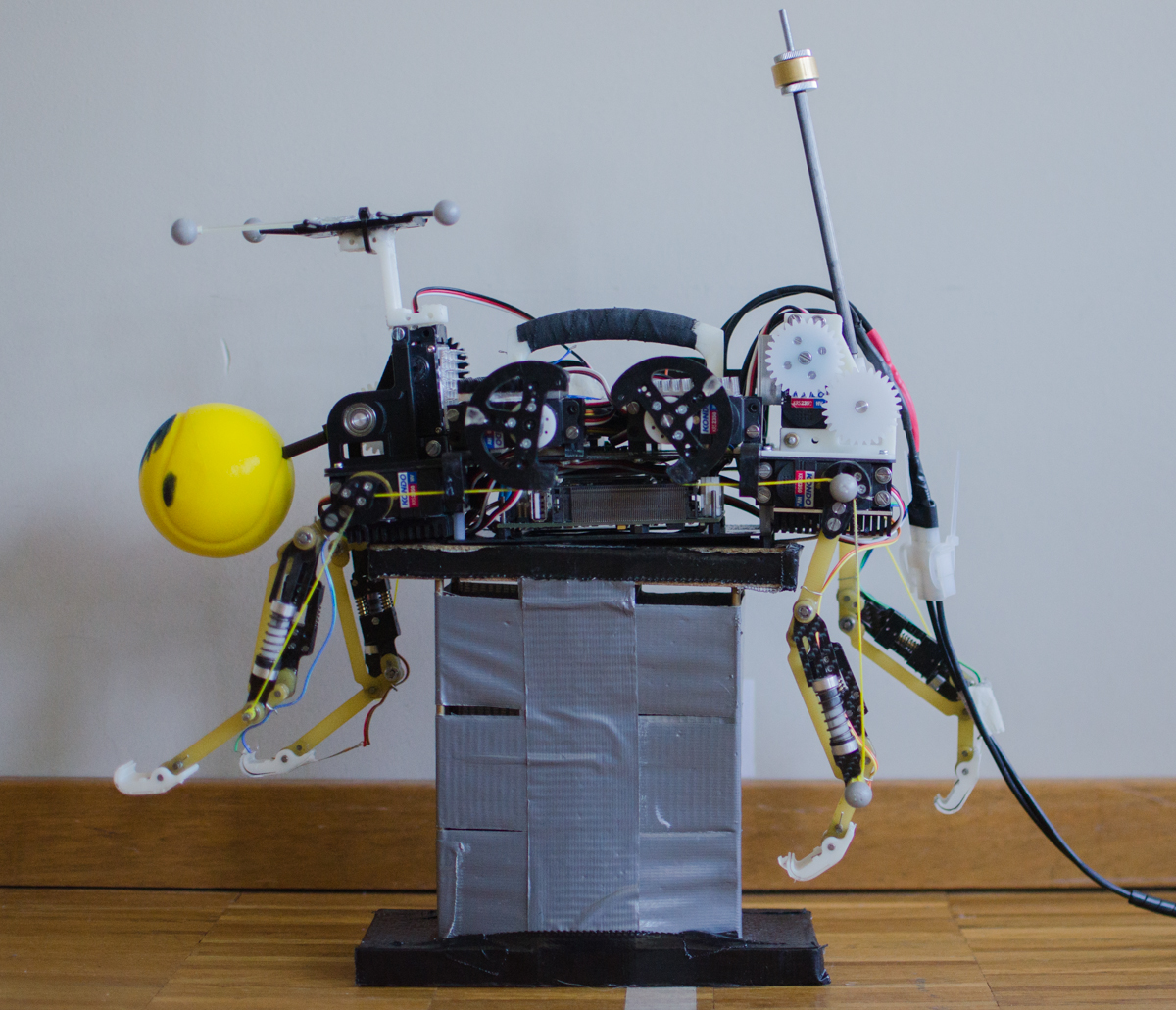
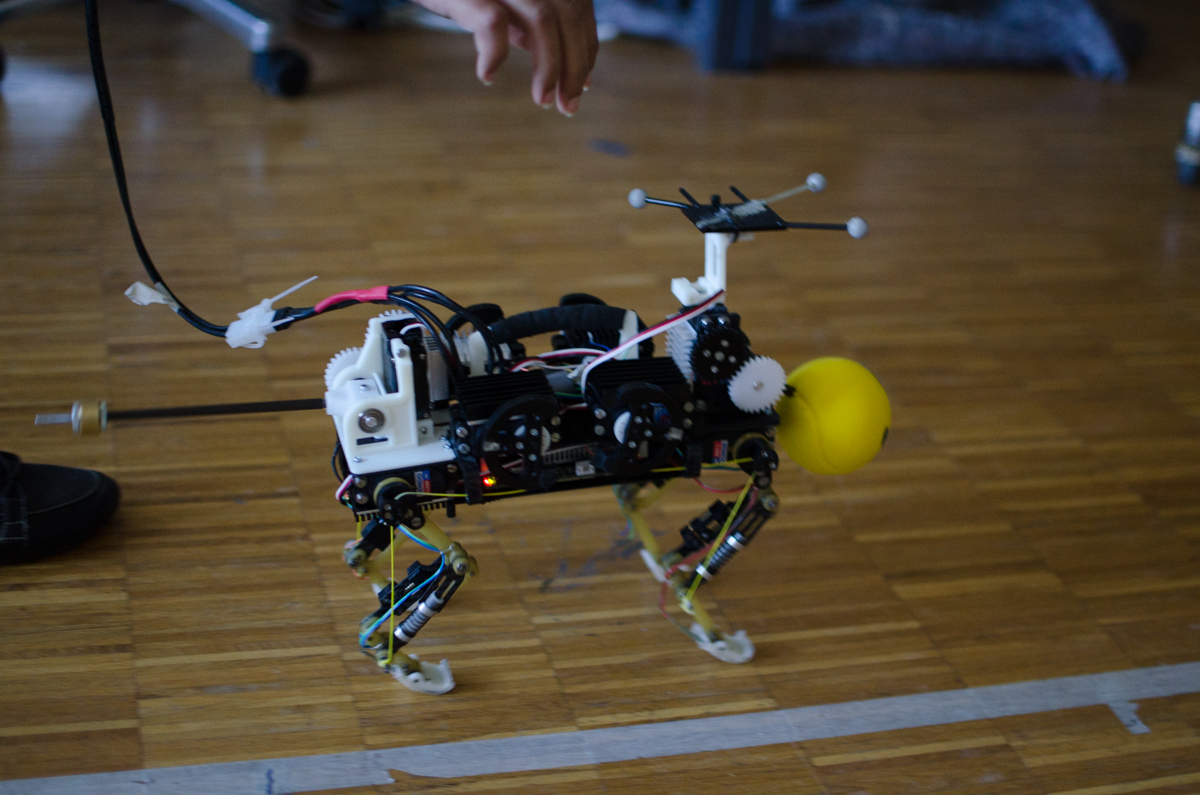
This work explores the possible roles of active tails for steady-state legged-locomotion. A series of simple models are proposed which capture the dynamics of an idealized running system with an active tail. The models suggest that the control objectives of injecting energy into the system and stabilizing body-pitch can be effectively decoupled via proper tail design: a long, light tail. Thus the overall control problem can be simplified, using the tail exclusively to stabilize body-pitch: this effectively relaxes the constraints on the leg-actuators, allowing them to be recruited specifically for adding energy into the system. We show in simulation that models with long-light tails are better able to reject perturbations to body-pitch than short-heavy tails with the same moment of inertia. Further, we present the results of a one degree-of-freedom tail mounted on the open-loop controlled quadruped robot Cheetah-Cub-T. Our results show that an active tail can greatly improve both forward velocity and reduce body-pitch per stride, while adding minimal complexity. Further, the results validate the long-light tail design: shorter, heavier tails are much more sensitive to configuration and control parameter changes than longer and lighter tails with the same moment of inertia.
Pictures
Field Guide to Northern Tree-related Microhabitats: Descriptions and size limits for their inventory in boreal and hemiboreal forests of Europe and North America
R. Bütler Sauvain; L. Larrieu; L. F. Lunde; M. Maxence; B. Nordén et al.
Swiss Federal Institute for Forest, Snow and Landscape Research WSL, Switzerland, 2024. Comparison of Three Viral Nucleic Acid Preamplification Pipelines for Sewage Viral Metagenomics
X. Fernandez Cassi; T. Kohn
Food and Environmental Virology. 2024. DOI : 10.1007/s12560-024-09594-3. How to Support Students to Develop Skills that Promote Sustainability
S. R. Isaac; J. de Lima
Teaching Transversal Skills for Engineering Studens: A Practical Handbook of Activities with Tangibles; EPFL, 2024. How to Support Students Giving Each Other Constructive Feedback, Especially When It Is Difficult to Hear
S. R. Isaac; J. de Lima
Teaching Transversal Skills for Engineering Studens: A Practical Handbook of Activities with Tangibles; EPFL, 2024. How teachers can use the 3T PLAY trident framework to design an activity that develops transversal skills
S. R. Isaac; J. de Lima
Teaching Transversal Skills for Engineering Studens: A Practical Handbook of Activities with Tangibles; EPFL, 2024. Radio-Activities: Architecture and Broadcasting in Cold War Berlin
A. Thiermann
Cambridge, MA; London: MIT Press, 2024. All That is Solid
A. Thiermann
Transcalar Prospects in Climate Crisis; Zurich: Lars Müller, 2024.