Project Description
![]()
Symbitron: Symbiotic man-machine interactions in wearable exoskeletons to enhance mobility for paraplegics
2013-10-01 to 2018-03-31 (ongoing project)
The goal of Symbitron is to enable individuals with paraplegia to regain mobility with a novel lower-limb exoskeleton and a bio-inspired controller. BioRob’s role is to develop and test a neuromuscular controller that can produce various walking gaits with resemblance to human kinematics, kinetics, and muscle activations with few sensors and no pre-defined reference patterns.
Neuromuscular Controller
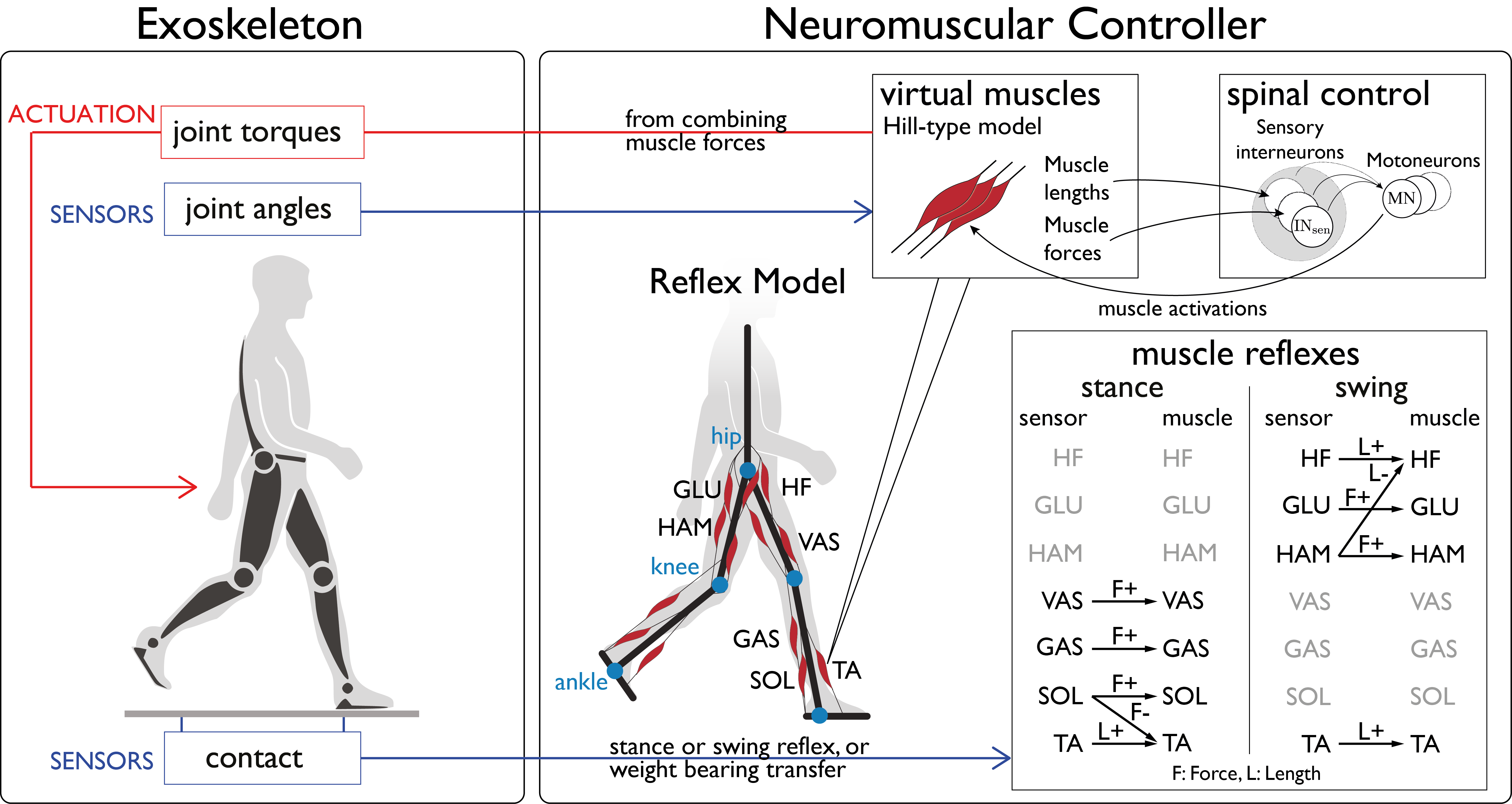
For real world function, wearable devices to assist gait should be highly responsive to both the user and the environment. Users should also be able to interact with the device in an intuitive manner. This positive shared control between machine and human is especially important for individuals with spinal cord injuries, where active recruitment of their own neuromuscular system could promote motor recovery. Here we demonstrate the capability of a biologically-inspired neuromuscular controller (NMC) and its use in assisting the gait of SCI test pilots.
The NMC was based on a sagittal plane neuromechanical simulation developed by Hartmut Geyer, which generates walking by activating simulated muscle reflex loops stimulated by few sensory imputs. Only the foot contact states and joint angles are needed to activate the simulated reflex loops of the Hill-type muscle models. The stance reflexes loop provides weight bearing support during the stance phase, and the swing reflexes allow the leg to flex and swing freely. The muscle forces generated from the virtual muscle dynamics combine to produce knee and hip torque commands to the gait trainer. The advantages of this controller over other approaches include robustness, modularity, and adaptability. In particular, the controller does not require filtering of its inputs (as with myoelectric control), can be decomposed into relevant modules (e.g. only knee or hip control), and can generate walking at different speeds and on different terrains in simulation.
For implementation on hardware, we developed a NMC Simulink library with control modules that allowed for tailoring to specific exoskeleton devices. So far we have tested the NMC on three different devices. The ankle module was tested on powered ankle exoskeleton Achilles, and the knee and hip modules were tested with gait trainer LOPES (both devices are from UTwente). We are currently testing the ankle and knee module on our new wearable exoskeleton. To provide subject-specific control for the SCI subjects, the NMC modules were designed to provide asymmetric control between the right and left legs, between extension and flexion, and among different muscles.
Tests with Human Subjects
We evaluated our controller with both healthy and paraplegic subjects. The modular nature of our controller enables us to test it on several different types of lower limb assistive devices. We evaluated subjects’ walking kinematics and kinetics, muscle activation levels, and metabolic power when possible.
 Ankle Control
Ankle Control
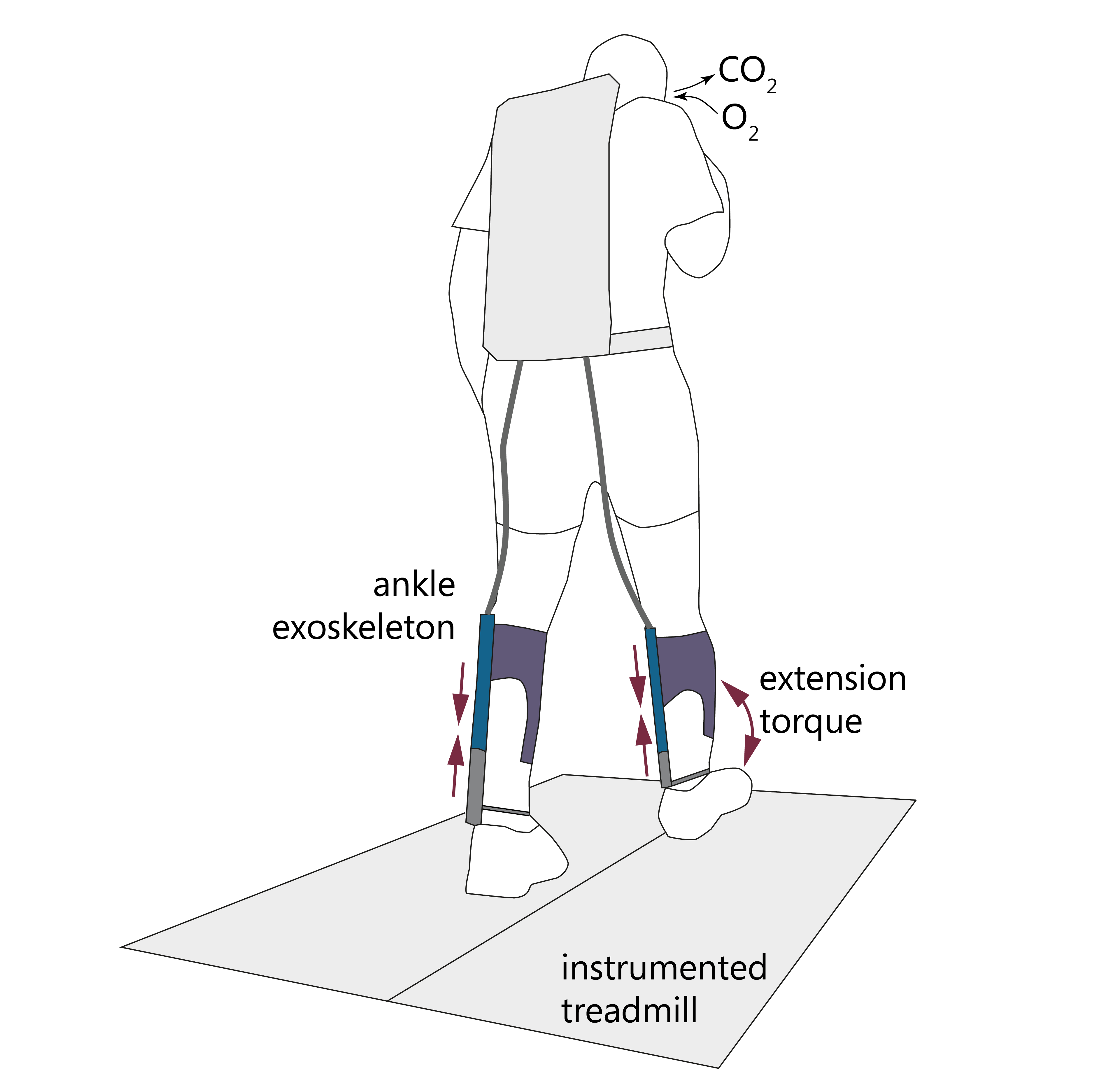
We tested the ankle module of the neuromuscular controller with a powered ankle exoskeleton (UTwente’s Achilles) on healthy subjects and paraplegic test plots with some mobility. For the healthy subjects, we evaluated the mechanics and energetics of walking with such a device and controller. This controller was designed to mimic human reflex patterns during locomotion, which we hypothesized would lead to lower energetic costs compared to walking with the added mass of the device only. Preliminary tests found that healthy-like gait patterns remained intact, and metabolic costs were reduced compared to the transparent mode of the device. Muscle activity of the tibialis anterior and soleus were also reduced with the assistive push-off. Please see Dzeladini et al. 2016 under Publications for more information.
 Knee and Hip Control
Knee and Hip Control
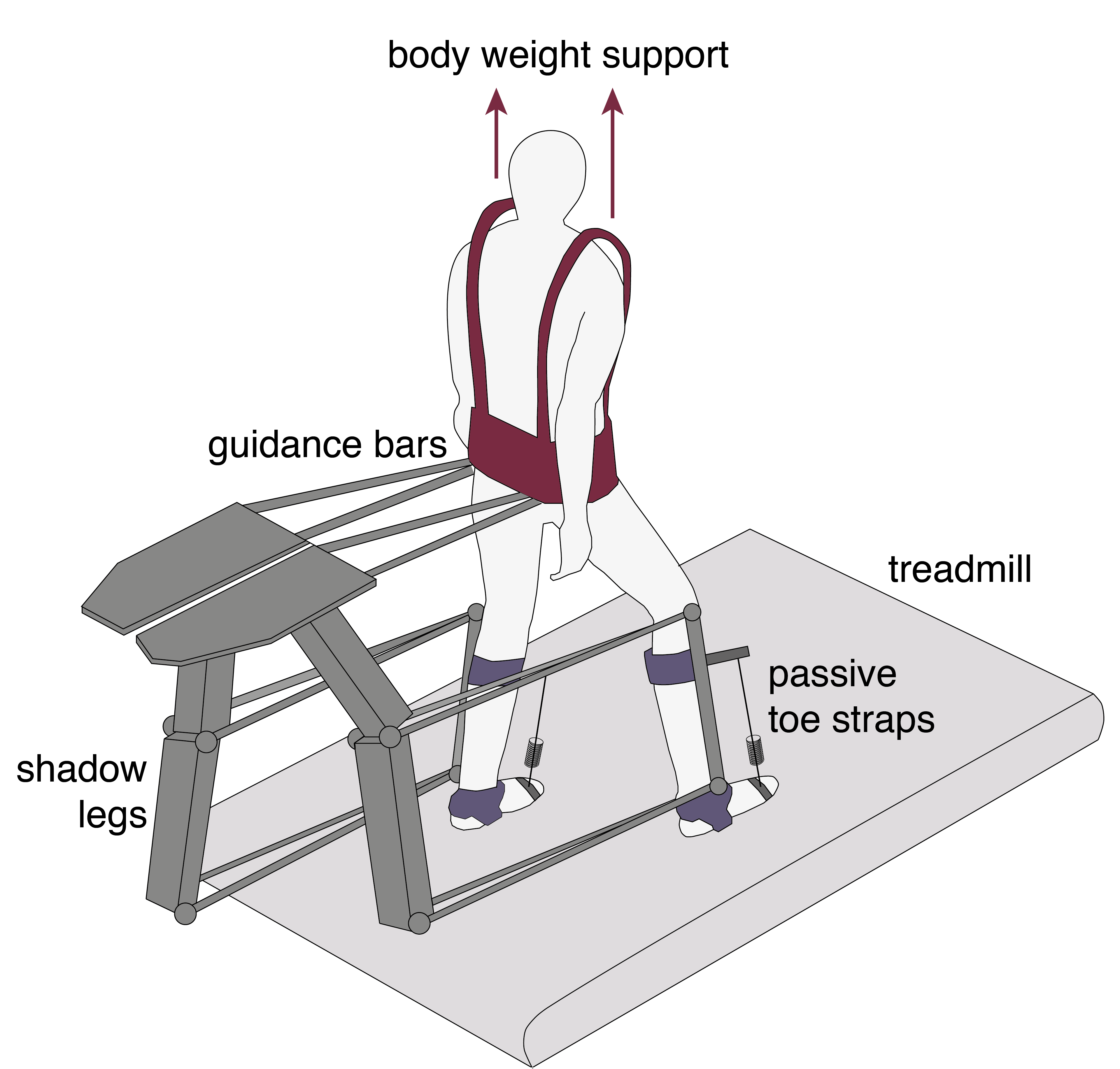
We evaluated the neuromuscular controller on a lower-limb knee and hip robotic gait trainer (UTwente’s LOPES) with seven pilots with paraplegia (four complete, two incomplete) and one healthy subject. We determined that the NMC could enable normal-like walking gait kinematics at various walking speeds. We found that SCI pilots could walk at a range of normal walking speeds– from 0.6 m/s to 1.4 m/s. Despite a few differences between NMC-produced torques and healthy biological torques, the SCI joint kinematics were similar to healthy kinematics. With few sensors and no predefined gait patterns for multiple speeds or different subjects, the NMC could produce various walking patterns based on subject interaction with the environment. Please see Wu et al. 2017 under publications for more information.
 WE1: Ankle and Knee Control
WE1: Ankle and Knee Control
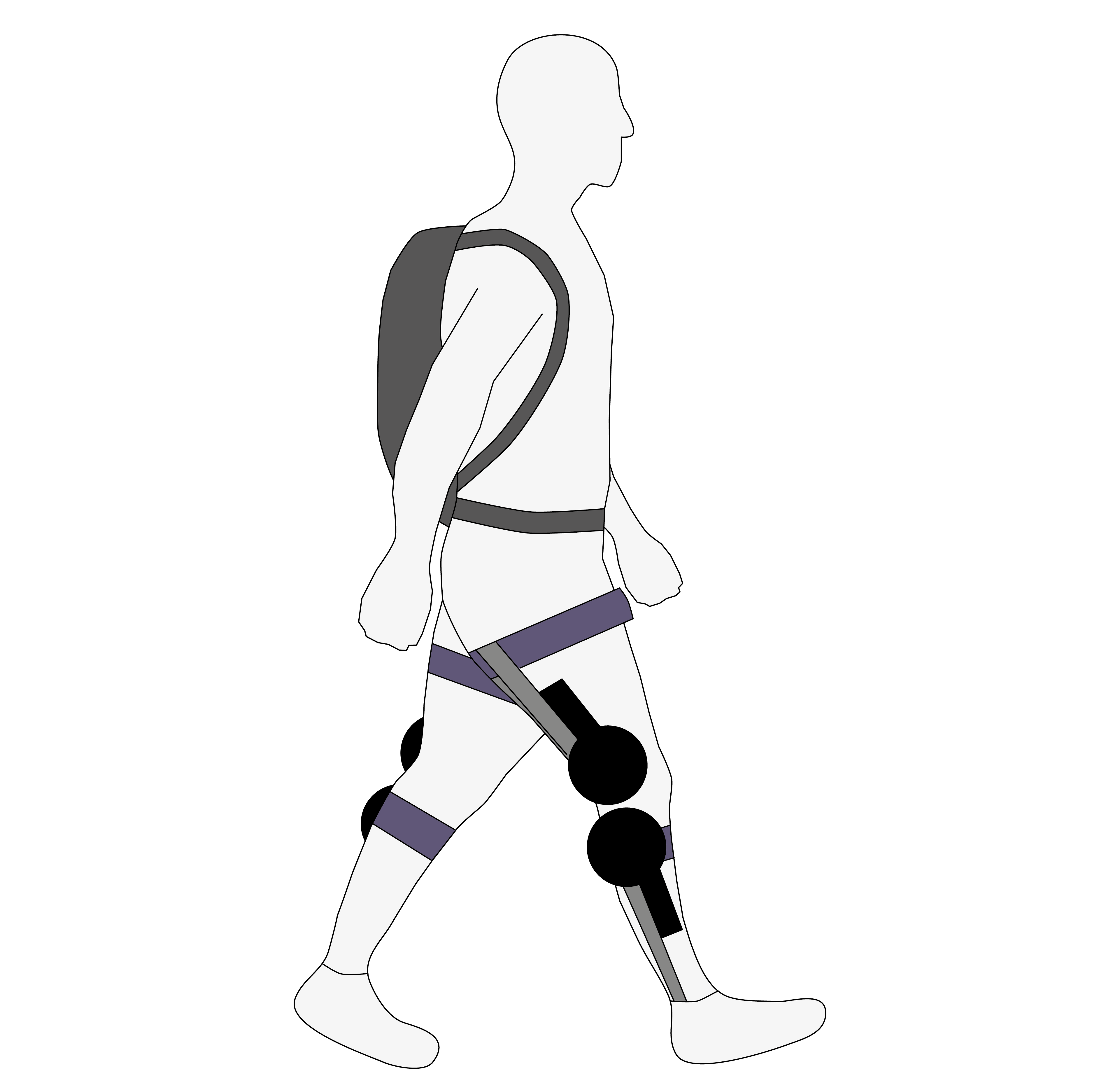
Our consortium partners at Delft and UTwente have developed a new ankle and knee wearable exoskeleton. Tests of the NMC with this device on paraplegic pilots are currently ongoing at the Fondazione Santa Lucia, another one of our consortium partners. Since this exoskeleton only actuates the ankle and knee, these pilots already have some volitional control of their hip joint.
WE2: Lower Limb Control (ankle, knee, hip)
Tests of the full lower limb exoskeleton and neurmuscular controller will be conducted in early 2018. These tests will involve paraplegic pilots who do not have volitional control of their hip joints.
Media
- Symbitron_WE1_promo_video.mp4Promotion video for WE1 (knee and ankle actuation) in zero impedance mode
Student Projects
Related student projects:
S. Berger. Energy consumption optimization and stumbling corrective response for bipedal walking gait.
F. Dzeladini. Implementation of a human feedback-based locomotion and its control by means of a feedforward component inspired by central pattern generators
A. di Russo. Biomechanical analysis of slow walking and stepping behavior in healthy subjects on treadmill
Researchers
<!– CORRECTED LINKS: BEGIN (textBox id=”455715″. lang=en. title=People being involved in these projects): –><!– CORRECTED LINKS: END (textBox id=”455715″. lang=en. title=People being involved in these projects). –>
Auke J. Ijspeert, Florin Dzeladini, Amy R. Wu
Publications
Spatiotemporal energy‐density distribution of time‐reversed electromagnetic fields
IET Science, Measurement & Technology. 2024-03-06. p. 1-12. DOI : 10.1049/smt2.12196.Efficient Data Access Paths for Mixed Vector-Relational Search
2024. 20th International Workshop on Data Management on New Hardware (DaMoN), Santiago, Chile, June 10, 2024.Optimizing Context-Enhanced Relational Joins
2024. IEEE 40th International Conference on Data Engineering (ICDE), Utrecht, Netherlands, May 13-17, 2024.Efficient and Reusable Lazy Sampling
SIGMOD Record. 2024. Vol. 53, num. 1, p. 33-42.Efficient Model-Relational Data Management: Challenges and Opportunities
IEEE Transactions on Knowledge and Data Engineering. 2024. p. 1-12. DOI : 10.1109/TKDE.2024.3384276.Oligolithic Cross-task Optimizations across Isolated Workloads.
2024-01-14. 14th Annual Conference on Innovative Data Systems Research (CIDR’24), Chaminade, USA, January 14–17, 2024,.Design rules for frequency conversion in periodically poled thin film lithium niobate waveguides
2024. Photonics West, San Francisco, January 29-February 1, 2024. p. 60. DOI : 10.1117/12.3002631.Un partenariat recherche – pratique pour l’éducation numérique
EP Revue suisse pour le formation continue. 2023-11-01. Vol. Les coopérations dans la formation continue, num. 2, p. 10.Nature-based solution enhances resilience to flooding and catalyzes multi-benefits in coastal cities in the Global South
Science of The Total Environment. 2024. Vol. 928, p. 172282. DOI : 10.1016/j.scitotenv.2024.172282.Projet EduNum – obligatoire et postobligatoire. Rapport sur la quatrième année.
2022
Contribution of standardized indexes to understand groundwater level fluctuations in response to meteorological conditions in cold and humid climates
Journal of Hydrology. 2024. Vol. 634, p. 131105. DOI : 10.1016/j.jhydrol.2024.131105.Projet EduNum — Obligatoire: Rapport sur la troisième année En Collaboration avec la HEP Vaud, l’UNIL et le DFJC
2021-11-15
Formation des enseignant·e·s au numérique Rapport sur la deuxième année de formation à l’Education Numérique aux Cycles 1 et 2A en Collaboration avec la HEP Vaud, l’UNIL et le DFJC
2020
Formation des Enseignant·e·s au Numérique: Rapport sur la Première Année de Formation à la Science Informatique au Cycle 1 en Collaboration avec la HEP Vaud, l’Unil et le DFJC
2019-04-20
Polarization-multiplexed thulium-doped fiber laser for free-running dual-comb generation
2023. Fiber Lasers XX: Technology and Systems, San Francisco, California, United States, 28 january – 2 february 2023. DOI : 10.1117/12.2648361.BSL Circular Economy 2024 Conference – BSL Blog
2024-04-19.Resource-Efficient Continual Learning for Personalized Online Seizure Detection
2024-04-15. 46th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Orlando, Florida, USA, July 15-19, 2024.Analytical Model of Single-Sided Linear Induction Motors for High-Speed Applications
2024-03-01.Open Access Identifying Aerodynamics of Small Fixed-Wing Drones Using Inertial Measurements for Model-Based Navigation
Journal of the Institute of Navigation. August 9, 2023. Vol. 70, num. 4. DOI : 10.33012/navi.611.TEST JDM: Batch upload xml
2021-07-15